인공지능 자율주행 자동차
강지연, 2021년 02월 01일
 인공지능 자율주행 자동차
인공지능 자율주행 자동차
인공지능 자율주행 자동차 자율주행 자동차란 운전자가 차량을 직접 운전하지 않아도 차량이 스스로 움직이는 자동차입니다. 자율주행차는 운전자의 조작이 없어도 카메라와 센서, GPS 정보 등을 이용하여 인공지능(AI) 기반으로 스스로 주위 환경을 인식하기 때문에 목적지까지 편하게 이동할 수 있습니다. 자율주행차(self-driving car), 무인자동차(driverless car), 스마트 카(smart car), 커넥티드카(connected car), 로봇자동차(robot car) 등의 여러 명칭이 있고, 간략히 자율차 또는 자주차라고도 합니다. 자율주행 자동차는 4차 산업혁명을 이끌어갈 핵심 키워드 중 하나입니다. 그래서 자율주행차는 공상과학(SF) 영화에서 자주 등장할 만큼 발전한 미래의 상징물이기도 하죠. 이를 실현시키기 위해 여러 자동차 업계에서는 인공지능(AI)의 발전에 끊임없는 노력을 해왔습니다. 점차 첨단 자동차 기술이 발전하면서 이제는 자율주행차가 현실이 되어가고 있습니다.
자율주행 자동차의 등장 배경
1926년 미국 뉴욕 전파 기술자인 프랜시스 후디나(Francis Houdina)는 전파 송신기와 회로 차단기를 차량에 설치하여 무인으로 자동차를 움직였습니다. 현재의 자율주행 자동차와는 차이가 존재하더라도, 지금의 발전에 오기까지 위대한 첫 발로 기억되고 있습니다. 현재 정의된 자율주행 자동차의 개념은 산업디자이너인 노먼 게디스(Norman Geddes)와 제너럴 모터스 컴퍼니(GMC; General Motors Company)가 1939년 뉴욕세계박람회에서 전시관 퓨처라마를 통해 미래의 도시상을 묘사하면서 처음으로 등장했습니다. 당시 노먼 게디스가 상상한 미래의 자동차는 컴퓨터 시스템과 자동 속도 조절 장치를 통해 주행하는데, 오늘날의 자율주행 자동차 개념에 부합한다는 것을 알 수 있습니다. 이후 1977년 일본의 쓰쿠바 기계공학 연구소에서 흰색 표시가 된 경계선을 인지하며 주행이 가능한 무인자동차를 세계 최초로 제작했습니다. 비록 최고속도는 시속 30km 정도였지만, 진정한 의미의 최초의 자율주행 자동차라고 할 수 있습니다. 1986년에는 에른스트 딕만(Ernst Dickmanns)이 카메라와 센서를 메르세데스-벤츠의 밴에 탑재해 최고시속 100km의 자율주행 자동차를 제작했습니다. 1994년 그는 메르세데스-벤츠의 500 SEL을 개조하여 반자율주행 자동차 2대를 제작하는데 성공하였습니다. 이 차량은 고속도로에서 130km의 속도로 총 1,000km의 거리를 주행하는데 성공했습니다. 이후 에른스트 딕만은 메르세데스-벤츠의 S클래스로 독일의 뮌헨부터 덴마크의 코펜하겐까지 총 1,600km 가량의 거리를 무인으로 주행하는데 성공했습니다. 미국에서는 1980년대부터 카네기멜론 대학교에서 자율주행 자동차에 대한 개발이 이루어졌습니다. 초반에는 시속 30km까지의 속도를 낼 수 있었고, 개발이 계속된 1995년에 총 5,000km의 거리 중 98.2%를 자율주행으로 주행이 가능한 차량을 제작하는데 성공했습니다. 하지만 이때까지는 조향만 자동이었고 가속과 제동 부분은 운전자가 맡았습니다. 미국 다르파(DARPA)는 자율주행 자동차의 개발을 위해 지속적인 투자를 하고 있는데, 궁극적인 목표는 미 육군 장비의 1/3을 무인장비로 대체하는 것입니다. 이를 위한 기반을 다지기 위해 2004년부터 다르파가 자율주행 자동차 대회를 개최하고 있습니다. 첫 번째 대회에서는 완주에 성공한 팀이 없었지만, 뒤이어 개최된 대회에서 미국 스탠퍼드 대학교의 자율주행 자동차가 6시간 54분의 기록을 달성하며 우승을 거머쥐었습니다. 당시 이 팀을 이끌었던 세바스찬 쓰런(Sebastian Thrun) 박사는 구글엑스(Google X) 연구소의 초대 소장이며 구글 자율주행 자동차 개발의 주요 인물입니다. 그는 자율주행 자동차 개발의 책임을 맡아 2009년부터 구글X 프로젝트를 통해 본격적으로 개발에 착수했습니다.
자율주행차의 장점
 자율주행 자동차
자율주행 자동차
자율주행 자동차의 가장 큰 장점은 직접 운전하지 않아서 편할 뿐 아니라, 연료 감소에 효율성이 높다는 것입니다. 또한 스스로의 힘만으로 운전하기 어려운 노인, 아동, 장애인도 편리하게 이용할 수 있습니다. 운전자가 장시간 운전하며 누적되는 피로를 줄여줄 수 있습니다. 안전성의 측면에서는 도로의 교통 흐름을 원활하게 만들어 교통 혼잡을 방지하고 교통사고의 위험성도 줄어듭니다.
(1) 사고 확률 감소
자동차 사고는 주로 운전자들의 실수에서 비롯되는데 졸음과 반응 시간 등의 여러 이유로 항상 좋은 컨디션이 지속되기는 힘듭니다. 반면 자율주행 자동차는 360도의 시야와 다른 사물을 바로 인지할 수 있는 능력을 통해 사고의 발생을 줄일 수 있습니다. 따라서 정확한 자율주행 시스템이 도입되면, 교통사고의 확률이 감소하고, 결론적으로 사망률까지도 낮출 수 있습니다. 미래사회에서는 ‘인간 운전 금지법’이 생길지도 모른다는 말도 있습니다.
(2) 시간 낭비의 방지
자율주행 자동차는 교통 혼잡을 해소하고 주차 장소를 찾는 시간과 주차하는 시간을 동시에 줄여줍니다. 운전자의 손이 자유로워지면 휴식을 취하거나 다른 업무를 처리하거나 게임, 영화 등 엔터테인먼트를 즐기는 등 시간을 보다 효율적이고 용이하게 사용할 수 있습니다. 게다가 사람보다 더 좁은 간격으로 주차가 가능하여, 주차 공간의 낭비가 없어 이전보다 효율적입니다.
(3) 에너지 낭비의 감소
자율주행 자동차의 시스템은 사람보다 다른 자동차의 존재를 더욱 잘 감지할 수 있어 다른 차량과 더 가깝게 유지하며 주행할 수 있습니다, 따라서 공기 저항을 효율적으로 줄이는 것이 가능합니다. 고기저항을 줄이ㅁ면 결과적으로 연료 소비량을 줄일 수 있습니다. 먼 미래에는 무인자동차로 인해 자동차를 소유하는 개념이 사라지게 될 수도 있습니다. 그리고 무인자동차를 보편적으로 사용하게 되는 때가 온다면, 차량의 주행상황을 교통관제 센터가 모두 관리하게 됩니다. 그렇다면 우리는 굳이 비싼 유지비를 들여 자동차를 소유할 필요가 없이, 필요할 때만 불러 이용할 수도 있을 것입니다.
(4) 노약자의 이동 기회 확대
무인자동차는 장애인이나 노약자들이 스스로 운전하는 것보다 더욱 안전한 이동을 보장해 줍니다. 또한, 운전 중에 급격한 신체적 위험이 발생하였을 경우 긴급하게 차량을 안전구역으로 자동으로 이동하며, 의료지원을 받을 수 있도록 할 수 있습니다. 따라서 운전에 제약이 있거나 거동이 불편한 노약자나 장애인들이 훨씬 쉽게 운전할 수 있어 이동 기회를 확대할 수 있습니다.
자율주행차의 장점
자율주행 자동차는 GPS 기반으로 주행하지만 인터넷 접속이 가능해진다면 해킹이 가능해져 해커들이 마음대로 조종할 수 있다는 위험성이 존재합니다. 또한 흰색 차량을 잘 감지하지 못하는 등 더욱 세밀한 기술의 발전이 필요합니다. 마지막으로 윤리적인 문제 또한 큰 문제 중 하나로 주목받고 있습니다.
(1) 법적 책임
자율주행 자동차로 주행하는 경우 사고가 발생한다면 누구에게 책임을 물어야 할까요? 자동차 회사, 시스템 설계자, 공장 설계자 중 아직까진 그 누구에게도 법적 책임을 묻기가 애매한 것이 사실입니다. 국토교통부가 발표한 ‘자동차손해배상 보장법’에 따르면 자율주행 자동차로 사고가 일어난 경우 기존대로 운행자가 일단 책임을 지도록 하지만, 자동차 결함이 있는 것으로 확인된 경우 제작사에 구상권을 청구할 수 있습니다. 따라서 사고 발생 시 보험회사가 사고조사위원회에 사고 발생 사실을 통보하고, 사고조사위원회에서는 해당 자동차에 부착된 자율주행 정보 기록 장치에 기록된 내용을 토대로 조사를 진행합니다. 조사 중 차량의 결함이 의심되는 경우, 관련 정보를 자동차안전연구원 내 결함조사기관에 제공하여 일반 자동차와 마찬가지로 결함조사를 진행하는 방식으로 처리가 이루어집니다.
(2) 신뢰도
자율주행 자동차가 비록 사람보다 실수가 적다고 하더라도 프로그램의 오류가 발생하지 않는다는 보장은 할 수 없습니다. 그리고 만약 무인자동차의 시스템에 오류가 발생한다면 더 큰 사고의 발생 가능성이 있습니다. 사람이 아닌 컴퓨터로 조작되기 때문에 작은 오류의 발생과 자동차 해킹의 위험성이 있어 보안이 철저하게 이뤄져야 합니다.
(3) 개인정보보호
자율주행 자동차는 운전자의 습관과 취향, 선호도에 맞춰 인공지능이 스스로 학습하며 정보를 수집하기 때문에 사생활과 관련된 여러 개인정보가 저장됩니다. 이러한 데이터에 누군가 의도적으로 접근하여 해킹을 한다면 사생활 침해 문제로 연결됩니다. 불법적으로 취득한 개인정보를 어떠한 목적으로 사용될지 알 수 없기 때문에 매우 큰 주의가 필요합니다.
(4) 보안
개인정보보호 문제와 마찬가지로 누군가 자동차를 제어하는 컴퓨터를 해킹한다면 원하고자 했던 목적지가 아니라 다른 장소로 이동하게 만들거나, 완전히 망가트릴 수도 있습니다. 그리고 운전 데이터를 사용하여 특정한 광고를 지속적으로 내보내는 등의 일도 발생할 수 있습니다. 흔한 예로 한 번쯤 컴퓨터에 깔지도 않은 팝업창이나 결제창이 뜨는 것을 볼 수 있는데 이 대상이 컴퓨터가 아닌 자동차로 바뀌었다고 가정한다면 그 위험성을 더 절실히 깨달을 수 있습니다. 더 나아가 사이버 테러리스트가 폭탄을 장착한 자율주행 자동차를 통해 테러에 사용할 위험성도 존재합니다.
(5) 실업률 증가
자율주행 자동차가 내연기관 자동차를 대체하고 점점 상용화된다면 이에 따라 많은 직업들이 사라질 가능성이 존재합니다. 예를 들어 트럭 운전사, 택시 운전사, 버스 운전사와 같은 수많은 운전 기사들의 직장이 사라지게 되어, 전 세계의 실업률이 높아질 수 있습니다. 게다가 이러한 흐름에 맞춰 운전보험과 운전학원의 존재가 불필요해져 보험사와 연수 교사 등 운전과 관련된 다양한 직업이 사라질 위험성이 대두되고 있습니다.
자율주행 기술의 6레벨
자율주행은 레벨0에서 레벨5까지 총 6단계로 나눠져 있습니다.
(1) 레벨 0단계
자율주행 레벨 0단계는 운전자가 모든 판단을 하고 주행에 관련된 물리적인 행동을 필요로 합니다. 그래서 인간이 직접 운전석에 앉아 조향, 가속·감속, 제동 등을 직접 제어해야 합니다. 자동화된 시스템이 경고를 발생시키거나 순간적으로 개입할 수는 있지만, 차량을 지속적으로 제어할 수는 없습니다. 좀 더 확장된 관점에서 차선을 이탈하거나 앞차와의 간격이 좁을 때 경고음을 들려주는 기능 역시 이에 해당합니다. 따라서 모든 조작을 운전자가 직접해야하기 때문에 자율주행 기술과 아무런 관련이 없는 단계입니다.
(2) 레벨 1단계
자율주행 레벨 1단계는 차량이 가속과 감속 조작을 담당하며 운전자는 조향을 담당하는 것을 뜻합니다. 차선이탈경보, 긴급제동 등의 운전자 보조 시스템을 갖추고 있습니다. 이 단계에서는 차량 제어 기능을 운전자와 자동 시스템이 공유해, 자동차가 제동, 조향, 가속·감속 등에 직간접적으로 개입합니다. 차량의 속도를 일정하게 유지하는 크루즈 컨트롤, 스티어링을 자동화하는 주차 지원 시스템, 충돌을 경고하고 최대 제동 용량을 정하는 충돌 완화 시스템 등이 여기에 해당합니다. 0단계와 마찬가지로 1단계에서도 운전자의 상당한 개입이 필요합니다.
(3) 레벨 2단계
자율주행 레벨 2단계는 첨단운전자 보조시스템으로 차로유지 기능이 적용되어 있어 ‘지능형 운전자 보조 시스템’(ADAS)에 해당합니다. 2020년까지 도로에는 2단계 자율주행에 해당하는 스마트 크루즈 컨트롤과 차선유지보조 기능이 들어간 자동차가 상용화되었습니다. 만약 운전자가 운전대를 잡지 않으면 경고음이 울리며 수동으로 전환됩니다. 자율주행 레벨 1단계에서는 조향, 가속·감속, 제동 중 한 가지 기능만 자동화할 수 있었지만, 2단계부터는 이러한 조작 기능을 복합적으로 자동화할 수 있습니다. 하지만 운전자는 주행을 모니터링하고 언제든지 개입할 준비가 필요합니다. 이 단계의 자동차는 차로 구분이 확실하고 대부분의 차량이 일정한 속도로 달리는 고속도로에서는 운전자의 조향을 직접 보조해 줄 수 있습니다. 운전자의 시선을 카메라로 감시해 교통 상황에 주의를 기울이고 있는지 확인할 수 있습니다.
(4) 레벨 3단계

 자율주행 오토파일럿 기능이 장착된 테슬라 모델3
자율주행 오토파일럿 기능이 장착된 테슬라 모델3
자율주행 레벨 3단계는 운전의 주체가 사람에게서 컴퓨터로 변경됩니다. 자동차가 직접 조향, 가속·감속, 제동 등을 스스로 할 수 있는 단계로서 제한된 구간에서 운전자와 자율주행시스템(ADS) 사이에 제어권 전환이 수시로 이뤄집니다. 이를 통해 사고가 날 수 있는 상황을 피해 움직일 수 있으며, 운전자는 주변 상황에 크게 신경 쓰지 않아도 됩니다. 물론 최종 통제권은 운전자에게 있습니다. 차량은 비상 제동과 같은 상황을 처리할 수 있고, 공동 운전자의 역할을 합니다. 물론 모든 조작을 자율주행 자동차에게 맡길 수 있지만, 특정한 위험 상황에서 자동차가 수동운전을 요청할 경우 운전의 주체는 다시 사람으로 변경해야 합니다. 자율주행 레벨 3단계 기술은 이미 오토파일럿이 장착된 테슬라 모델3, 메르세데스-벤츠 S클래스 등 여러 자동차에 실제로 적용되어 있습니다.
(5) 레벨 4단계
자율주행 레벨 4단계의 경우 완전한 자율주행 차량으로서, 위험할 때는 사람이 수동 조작해야 하지만 운전자가 운전에 더 이상 신경 쓰지 않아도 주행이 가능합니다. 간단한 예시로 스스로 달리던 자동차가 위급한 상황에 마주쳤을 때 운전자에게 직접 제어할 것을 요청하지만, 이때 운전자가 잠들었을 경우 자동차 스스로 속도를 줄이고 갓길에 정차하는 등의 제어가 가능한 정도입니다. 자동차 스스로 모든 것을 판단하기 때문에 자율주행 프로세서의 역할이 중요합니다. 실제로 2017년에 SK텔레콤에서 4단계 자율주행 자동차의 시범 운행을 시작했고 2018년 2월 2일에는 현대자동차가 평창 동계 올림픽 개최를 앞두고 5G 네트워크 기술이 담겨진 4단계 수준의 자율주행차를 선보였습니다.
(6) 레벨 5단계
마지막으로 자율주행 레벨 5단계는 위험 상황에서조차 사람의 개입이 필요 없는 자율주행 자동차의 최종 형태입니다. 2016년 9월에 미국자동차공학회(SAE)가 발표한 자율주행 기술 수준의 정의이기도 합니다. 탑승자가 차에 올라타 목적지를 말하거나 내비게이션에 입력하면 목적지까지 자동으로 이동이 가능합니다. 이 단계의 자동차는 운전석이 필요하지 않고, 실내를 단순히 앉는 공간이 아니라, 이동형 사무실, 숙박시설, 여가시설 등으로 활용하는 것도 가능합니다. 완전 자율형 차량은 일반적으로 위치 파악, 환경 지도(SLAM) 제작 및 장애물 감지를 위해 컴퓨터 비전(computer vision)을 사용합니다. 컴퓨터 비전이란 기계의 시각에 해당하는 부분을 연구하는 컴퓨터과학의 최신 연구 분야 중 하나입니다. 인간의 시각이 할 수 있는 몇 가지 일을 수행하는 자율적인 시스템을 만드는 것이 최종 목표입니다. 특정 작업이나 특정 이벤트를 감지하는 데도 사용할 수 있으며, 지원 시스템의 예로는 자동차의 장애물 경고 시스템, 항공기의 자율 착륙 시스템 등이 있습니다. 여러 자동차 제조사가 자동차 자율주행을 위한 시스템을 시연했지만 아직 시장에 내놓을 수 있는 수준에 이르지는 못했습니다. 그럼에도 컴퓨터 비전 기술 덕분에 자동차 제조업체는 더욱 안전하고 우수한 성능의 자율주행 차량 내비게이션을 제공함으로써 자율주행을 현실화하고, 믿음직한 운송수단의 제공이라는 목표를 달성할 수 있습니다.
자율주행 자동차의 구동 원리
(1) 인지단계 (카메라, 레이더, 레이저, GPS)
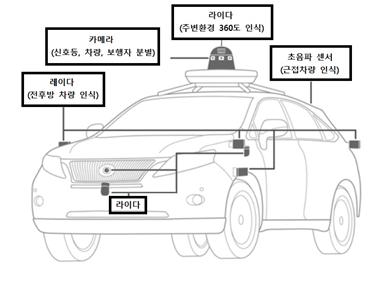 자율주행차 외부 인식 장치
자율주행차 외부 인식 장치
자율주행 자동차의 구동 원리는 인지단계, 판단단계, 제어단계로 총 3단계의 순서를 거쳐 이루어집니다. 우선 자율주행 자동차에 탑재된 카메라, 레이더, 레이저, GPS 등을 활용하여 주변의 사물을 인지하고 다양한 정보를 축적합니다. 여기서 카메라는 시각적인 데이터를 통해 360도의 넓은 시야를 확보할 수 있습니다. 하지만 비나 안개 등의 기상악화에 취약하고 낮은 위치의 사물은 제대로 감지되지 않는 단점이 있습니다. 이러한 단점을 보완하기 위해 탑재되는 레이더는 시인성의 한계를 극복할 수 있습니다. 전파를 펄스로 전송하고 사물에 부딪히며 돌아오는 펄스파를 감지하여 더 많은 정보의 획득이 가능합니다. 하지만 레이더에도 단점이 있는데 다른 차량의 유형을 구별할 수 없다는 것입니다. 이를 보완하기 위해 필요한 것이 바로 레이저입니다. 레이저는 앞의 레이더와 같이 거리를 가늠하는데 중요한 광전자 기술입니다. 레이더 펄스를 통해 반사된 펄스파의 시간을 계산하고 거리를 측정하는데 레이저가 3D 정보를 제공합니다. 이를 통해 더욱 정확한 차량의 형태와 위치 데이터가 확보됩니다. 마지막으로 GPS는 자신의 위치를 기반으로 구축된 데이터와 다른 차량들에 설치된 GPS로 실시간의 교통상황과 정보가 확보됩니다. 이것으로 완벽한 자율주행의 시작인 인지단계가 완성됩니다.
(2) 판단단계 (인공지능, 딥러닝 기술)
인지단계에서 축적한 정보를 기반으로 주행 전략을 결정합니다. 이 역할을 수행하는 것이 바로 인공지능(AI)입니다. 인공지능은 인간처럼 학습하고 생각할 수 있는 컴퓨터 시스템입니다. 컴퓨터 프로그램을 통해 인간의 학습능력, 추론능력, 지각능력, 자연어의 이해능력 등 모든 지능적인 행동들을 모방이 가능해, 인공지능은 4차 산업혁명의 핵심 기술이라고 할 수 있습니다. 인공지능의 종류는 크게 3가지로 나눠지는데 약인공지능(Weak AI), 강인공지능(Strong AI), 초인공지능(Super AI) 등이 있습니다. 약한 인공지능은 미리 정의된 규칙에 의해 인지능력을 필요로 하지 않는 정도의 특정 영역의 문제를 푸는 기술로 자율주행 자동차는 여기에 해당됩니다.
더 나아가 인공지능에 딥러닝(deep learning) 기술이 적용됩니다. ‘스스로 학습하는 컴퓨터’라고 불리는 딥러닝은 컴퓨터가 사람처럼 생각하고 배울 수 있도록 하는 기술입니다. 또한 인공신경망의 한계를 극복하기 위해 제안된 기계학습법입니다. 인간의 뇌에서는 감각기관에서 받아들인 정보가 뉴런을 통해 뇌에 전달되고 뇌는 종합, 판단해 다시 명령을 내립니다. 이 과정에서 여러 개의 뉴런이 연결되면서 복잡한 연산을 수행하는데 이와 같은 두뇌의 정보처리 과정을 모방해서 만든 알고리즘이 바로 인공신경망입니다. 인간이 사고하는 것처럼 개체의 대략적인 특징값을 산출하며 이를 반복하면 기계는 스스로 특징값을 산출해 정보를 늘려갑니다. 세세한 규칙을 지정해 줄 필요 없이 스스로 특징들을 학습하기에 인간의 번거로움을 덜어준다는 장점이 있습니다. 결론적으로 사람이 학습을 시키는 머신러닝(machine learning)과는 달리 딥러닝은 스스로 학습한다는 특징으로 입력하지 않은 정보라도 인공지능이 알아서 가장 이상적인 결정을 내릴 수 있습니다. 하지만 높은 정밀도로 학습되기 위해서는 방대한 데이터가 필요합니다. 또한 인간은 딥러닝 내부의 알고리즘을 이해할 수 없기 때문에 오류수정이 사실상 불가능하다는 단점이 있습니다.
(3) 제어단계 (지능제어 시스템, 지능운행 장치)
마지막은 제어단계로 주행할 방향과 엔진의 구동 방식 등을 결정하고 자율주행이 시작됩니다. 자율주행 자동차는 차량의 운행을 감시하고 수시로 바뀌는 상황에 따라 적절한 명령을 내리는 운행 감시 체계가 구축되어 있습니다. 따라서 통합 관제 시스템을 통해 여러 상황을 분석하여 시스템의 고장 여부를 진단하고 오퍼레이터에 대한 적절한 정보를 제공하거나 경보를 알리는 기능을 수행할 수 있습니다.
그렇다면 현재 자율주행 자동차에 적용되고 있는 지능제어 시스템과 지능운행 장치는 무엇이 있는지 함께 알아보겠습니다. 먼저 지능형 순항 제어 시스템(ACC: Adaptive Cruise Control System)은 실제 차량 모델을 이용한 수학적인 해석에 근거하여 제어 명령을 생성하여 현재 무인자동차에 적용된 무인 운행 기법입니다. 레이더 가이드 기술에 기반을 두고 운전자가 페달을 조작하지 않아도 스스로 속도를 조절하여 앞차 또는 장애물과의 거리를 유지할 수 있습니다. 그리고 차선 이탈 방지 시스템(LKAS: Lane Keeping Assistance System)은 내부에 달린 카메라가 차선을 감지하여 의도하지 않은 이탈 상황을 운전자에게 알려주는 기술입니다. 자율주행 자동차에서는 도보와 중앙선을 구분하여 자동차가 차선을 따라 안전하게 주행할 수 있도록 지원합니다. 다음으로 주차보조 시스템(PAS: Parking Assistance System)은 운전자가 어시스트 버튼을 탐색한 후 후진 기어를 넣고 브레이크 페달을 밟으면, 자동차가 조향 장치를 조절하여 후진 일렬 주차를 도와주는 시스템입니다. 아울러 자동주차 시스템은 운전자가 주차장 앞에 차를 정지시킨 뒤 엔진을 끄고 내려서 리모콘 잠금 스위치를 2회 연속 누르면, 자동차에 설치된 카메라가 차고의 반대편 벽에 미리 붙여놓은 반사경을 탐지해 적정한 접근 경로를 계산하여 스스로 주차를 하는 기술입니다. 마지막으로 사각지대 정보 안내 시스템은 자동차의 양측면에 장착된 센서가 사이드 미러로 보이지 않는 사각지대에 다른 차량이 있는지를 판단하여 운전자에게 경고를 해주는 기능입니다. 따라서 복잡한 도로 상황에서 양측의 장애물 및 차량을 확인하여 차선을 변경할 때 매우 용이합니다.
자율주행 자동차의 상용화를 위한 과제
자율주행 자동차 시대의 도래는 우리에게 많은 이점을 주지만 한편으로는 새로운 과제가 주어집니다. 아무리 인공지능(AI) 기술이 발전하더라도 모든 위기상황을 예측하기는 쉽지 않으며, 설령 완벽하게 예측한다고 가정하더라도 도덕적·윤리적 판단의 문제가 여전히 존재하기 때문입니다.
가장 대표적인 문제는 트롤리 딜레마(trolley problem)입니다. 트롤리 딜레마란 사람들에게 브레이크가 고장난 트롤리 전차의 상황을 제시하고 다수의 사람들을 구하기 위해 소수를 희생할 수 있는지를 판단하게 하는 문제 상황을 뜻하는 단어입니다. 많은 사람들이 알고 있는 유명한 예시로 브레이크가 고장난 트롤리 기차가 있습니다. 레일 위에 5명의 인부가 일을 하고 있으며, 트롤리가 이대로 달린다면 5명은 반드시 죽게 되는 상황에서 주어진 방법은 두 가지입니다. 첫 번째 방법은 레일 변환기로 트롤리의 방향을 바꾸는 것인데 다른 레일 위에는 1명의 인부가 있습니다. 따라서 레일을 바꾸지 않는다면 5명의 목숨이, 바꾼다면 1명의 목숨이 희생됩니다. 이 문제는 영국의 윤리 철학자인 필리파 푸트(Philippa R. Foot)가 만들어낸 도덕적·윤리적 판단의 문제로서 응답자의 89%가 “방향을 바꾸어야 한다.”라고 응답했습니다.
이 상황을 자율주행 자동차에 대입하면 무인운전으로 주행 시 사고가 발생한다면 누구를 보호해야 할 것인가의 문제로 이어집니다. 만약 자율주행 자동차가 급격히 방향을 틀지 않는다면 앞에 있는 사람 5명을 칠 수 있고, 방향을 튼다면 자동차에 탄 사람 1명이 죽을 수도 있는 상황에서, 자율주행 자동차는 과연 어떤 결정을 내리게 될까요? 만약 이런 상황에서 자동차 제조회사가 5명을 살리기 위해 운전자 1명이 죽도록 설정된 자율주행차를 판매한다면, 과연 소비자들이 선뜻 구매할까요? 이기적인 인간이라면, 나의 목숨을 살리기 위해 다른 5명의 희생을 선택할 수도 있지 않을까요? 만약 이 기능이 자동차 환경설정에서 옵션으로 설정할 수 있다면 여러분은 어떤 선택을 할 건가요? 이 문제는 인간인 우리도, 그리고 발전한 인공지능 기술도 해결하기 어려운 철학적 문제입니다.
이러한 이유로 인공지능 기술이 아무리 발전하더라도 자동차에 대한 최소한의 통제권은 운전자에게 남겨둬야 한다는 주장은 계속해서 나오고 있습니다. 또한 앞으로 자율주행 자동차 시대가 도래한다면 발생하게 될 새로운 문제들에 대해 기존의 법리를 재해석하여 보완하거나, 인공지능 시대에 적합한 새로운 법 개념을 만들 필요가 있습니다. 그런 법을 만들기 위해서는 인공지능 시대에 맞는 새로운 철학과 사회적 합의가 필요할 것입니다. 여러분의 생각은 어떠신가요?





